#include <geometry_sphere.h>
Inheritance diagram for OpenTissue::geometry::Sphere< math_types_ >:
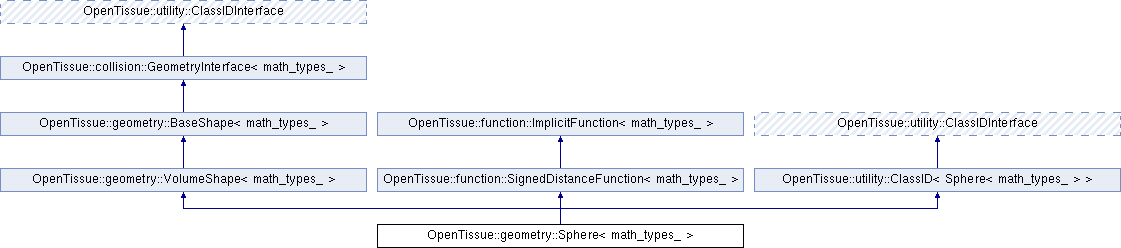
template<typename math_types_>
class OpenTissue::geometry::Sphere< math_types_ >
Member Typedef Documentation
template<typename math_types_>
| typedef math_types_ OpenTissue::geometry::Sphere< math_types_ >::math_types |
template<typename math_types_>
| typedef math_types::matrix3x3_type OpenTissue::geometry::Sphere< math_types_ >::matrix3x3_type |
template<typename math_types_>
| typedef math_types::quaternion_type OpenTissue::geometry::Sphere< math_types_ >::quaternion_type |
template<typename math_types_>
| typedef math_types::real_type OpenTissue::geometry::Sphere< math_types_ >::real_type |
template<typename math_types_>
| typedef math_types::value_traits OpenTissue::geometry::Sphere< math_types_ >::value_traits |
template<typename math_types_>
| typedef math_types::vector3_type OpenTissue::geometry::Sphere< math_types_ >::vector3_type |
Constructor & Destructor Documentation
template<typename math_types_>
| virtual OpenTissue::geometry::Sphere< math_types_ >::~Sphere | ( | ) | [inline, virtual] |
template<typename math_types_>
| OpenTissue::geometry::Sphere< math_types_ >::Sphere | ( | ) | [inline] |
template<typename math_types_>
| OpenTissue::geometry::Sphere< math_types_ >::Sphere | ( | Sphere< math_types_ > const & | s | ) | [inline] |
template<typename math_types_>
| OpenTissue::geometry::Sphere< math_types_ >::Sphere | ( | vector3_type const & | center_, | |
| real_type const & | radius_ | |||
| ) | [inline, explicit] |
Member Function Documentation
template<typename math_types_>
| real_type OpenTissue::geometry::Sphere< math_types_ >::area | ( | ) | const [inline] |
template<typename math_types_>
| vector3_type OpenTissue::geometry::Sphere< math_types_ >::center | ( | ) | const [inline] |
template<typename math_types_>
| void OpenTissue::geometry::Sphere< math_types_ >::center | ( | vector3_type const & | value | ) | [inline] |
template<typename math_types_>
| size_t const OpenTissue::geometry::Sphere< math_types_ >::class_id | ( | ) | const [inline, virtual] |
Query the class ID.
- Returns:
- The object's class ID
Reimplemented from OpenTissue::utility::ClassID< Sphere< math_types_ > >.
template<typename math_types_>
| void OpenTissue::geometry::Sphere< math_types_ >::compute_collision_aabb | ( | vector3_type const & | r, | |
| matrix3x3_type const & | , | |||
| vector3_type & | min_coord, | |||
| vector3_type & | max_coord | |||
| ) | const [inline] |
Compute Bounding Box. This method computes an axis aligned bounding box (AABB) that encloses the geometry.
- Parameters:
-
r The position of the model frame (i.e the coordinate frame the geometry lives in). R The orientation of the model frame (i.e the coordinate frame the geometry lives in). min_coord Upon return holds the minimum corner of the box. max_coord Upon return holds the maximum corner of the box.
template<typename math_types_>
| void OpenTissue::geometry::Sphere< math_types_ >::compute_surface_points | ( | std::vector< vector3_type > & | points | ) | const [inline] |
template<typename math_types_>
| real_type OpenTissue::geometry::Sphere< math_types_ >::diameter | ( | ) | const [inline] |
template<typename math_types_>
| real_type OpenTissue::geometry::Sphere< math_types_ >::evaluate | ( | vector3_type const & | x | ) | const [inline] |
template<typename math_types_>
| real_type OpenTissue::geometry::Sphere< math_types_ >::get_distance | ( | vector3_type const & | x | ) | const [inline] |
template<typename math_types_>
| vector3_type OpenTissue::geometry::Sphere< math_types_ >::get_support_point | ( | vector3_type const & | v | ) | const [inline] |
template<typename math_types_>
| vector3_type OpenTissue::geometry::Sphere< math_types_ >::gradient | ( | vector3_type const & | x | ) | const [inline] |
template<typename math_types_>
| vector3_type OpenTissue::geometry::Sphere< math_types_ >::normal | ( | vector3_type const & | x | ) | const [inline] |
template<typename math_types_>
| real_type OpenTissue::geometry::Sphere< math_types_ >::perimeter | ( | ) | const [inline] |
template<typename math_types_>
| void OpenTissue::geometry::Sphere< math_types_ >::radius | ( | real_type const & | value | ) | [inline] |
template<typename math_types_>
| real_type const& OpenTissue::geometry::Sphere< math_types_ >::radius | ( | ) | const [inline] |
template<typename math_types_>
| void OpenTissue::geometry::Sphere< math_types_ >::rotate | ( | matrix3x3_type const & | ) | [inline] |
template<typename math_types_>
| void OpenTissue::geometry::Sphere< math_types_ >::scale | ( | real_type const & | s | ) | [inline] |
template<typename math_types_>
| void OpenTissue::geometry::Sphere< math_types_ >::set | ( | vector3_type const & | center_, | |
| real_type const & | radius_ | |||
| ) | [inline] |
template<typename math_types_>
| void OpenTissue::geometry::Sphere< math_types_ >::set | ( | Sphere< math_types_ > const & | sphere_ | ) | [inline] |
template<typename math_types_>
| real_type OpenTissue::geometry::Sphere< math_types_ >::signed_distance | ( | vector3_type const & | x | ) | const [inline] |
template<typename math_types_>
| real_type const& OpenTissue::geometry::Sphere< math_types_ >::squared_radius | ( | ) | const [inline] |
template<typename math_types_>
| void OpenTissue::geometry::Sphere< math_types_ >::translate | ( | vector3_type const & | T | ) | [inline] |
template<typename math_types_>
| real_type OpenTissue::geometry::Sphere< math_types_ >::volume | ( | ) | const [inline] |
Member Data Documentation
template<typename math_types_>
vector3_type OpenTissue::geometry::Sphere< math_types_ >::m_c [protected] |
The center of the sphere.
template<typename math_types_>
real_type OpenTissue::geometry::Sphere< math_types_ >::m_r [protected] |
The radius.
template<typename math_types_>
real_type OpenTissue::geometry::Sphere< math_types_ >::m_r_sqr [protected] |
The squared radius.
The documentation for this class was generated from the following file:
- /home/hauberg/Dokumenter/Capture/humim-tracker-0.1/src/OpenTissue/OpenTissue/core/geometry/geometry_sphere.h
Generated on Thu Dec 1 2011 12:55:51 for HUMIM Tracker by
 1.7.1
1.7.1